

Hey! My name is Valentin. I’m a computational research scientist at Structura Biotechnology working on improving algorithms that underlie cryo-EM.
From August 2020 to July 2021, I was a postdoctoral research associate in the Robust Robotics Group with Prof. Nicholas Roy at MIT CSAIL. I did my doctoral work in the STARS Lab (Space & Terrestrial Autonomous Robotic Systems) under the supervision of Prof. Jonathan Kelly. My Ph.D. dissertation was entitled Learned Improvements to the Visual Egomotion Pipeline.
Recent news
I am currently…
- learning a ton about cryo-EM!
Recently…
- advising the organizing committee for the third annual debates workshop at ICRA 2021.
- I was web chair for Conference on Robot Learning (CoRL 2020).
- I co-chaired the 2020 RSS Pioneers workshop;
- I co-organized the Power On And Go (POGO) RSS (2020) workshop;
- my RSS work titled A Smooth Representation of SO(3) for Deep Rotation Learning with Uncertainty was awarded the Best Student Paper award, thank you to my incredible co-authors; (Official Page, arXiv preprint, YouTube)
A bit more about me
I love reading poetry, philosophy and literature (especially Weil, Chesterton, Schopenhauer, Blake, Thomas, McCarthy, and Tolstoy), playing sports (especially soccer, hockey, tennis, and basketball), hiking & portaging, and all things general aviation (I received my Canadian private pilot’s license in 2018).
Research Highlights
Rotation Estimation with HydraNet
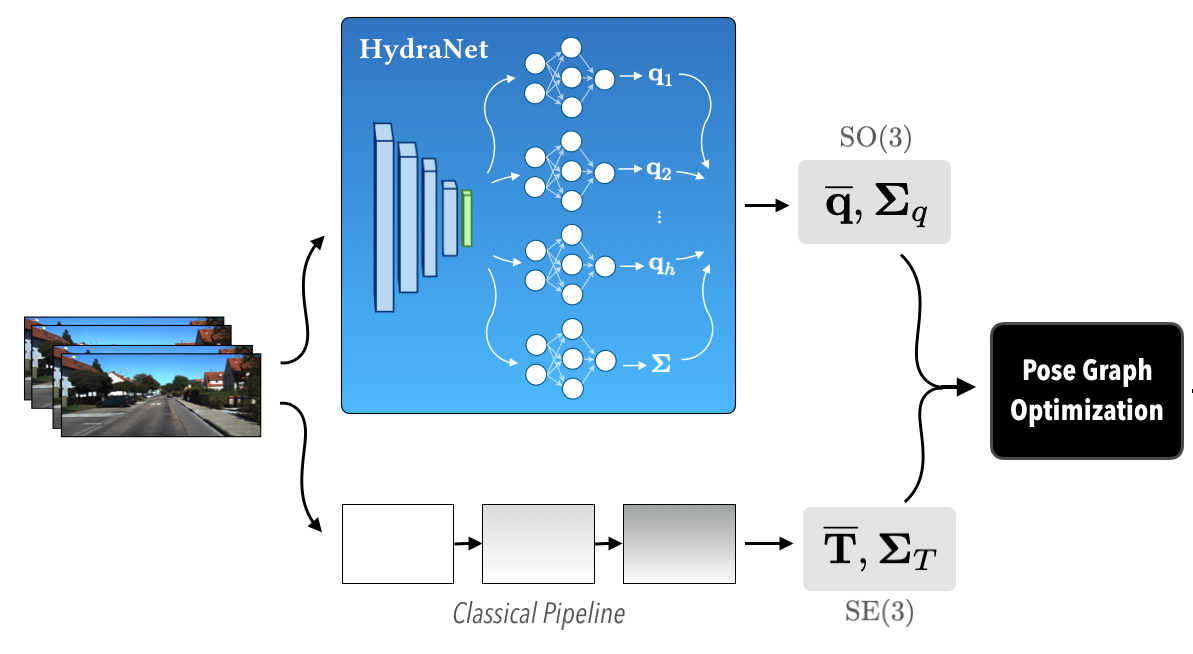
Using a multi-head structure, we build a deep network that can regress uncertain estimates of rotation using quaternion averaging and noise injection. This work is currently published in the CVPR Workshop on Uncertainty in Visual Learning as a workshop paper.
DPC-Net: Deep Pose Correction
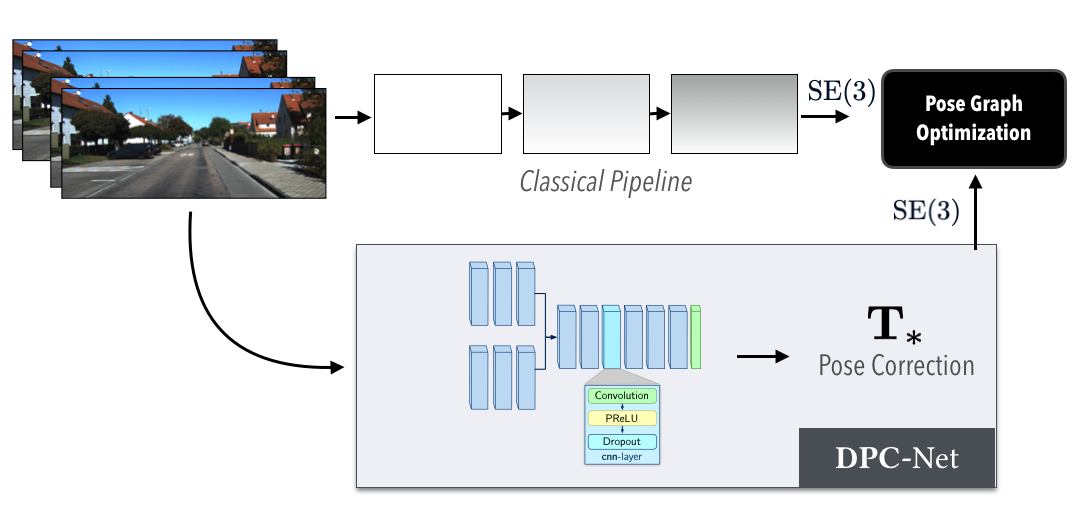
Deep Pose Correction Network (DPC-Net) is a deep learning approach to achieving accurate, robust visual localization by correcting existing geometric, probabilistic estimators. It's been published in Robotics and Automation Letters (and presented at ICRA 2018).
Sun-BCNN
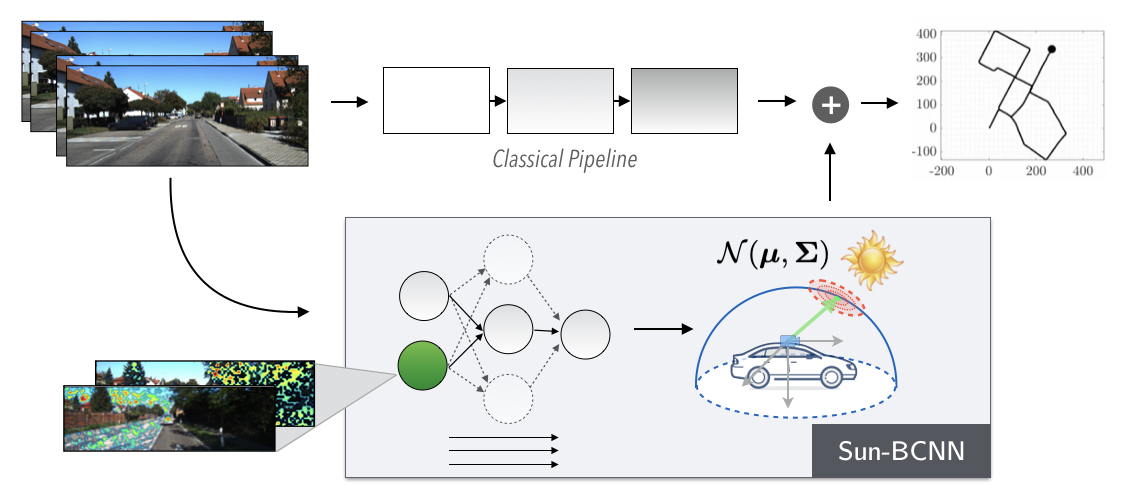
Sun-BCNN (Bayesian Convolutional Neural Network) infers the full 3D sun direction from single RGB images (which can then be used to improve localization).
PROBE: Predictive Robust Estimation
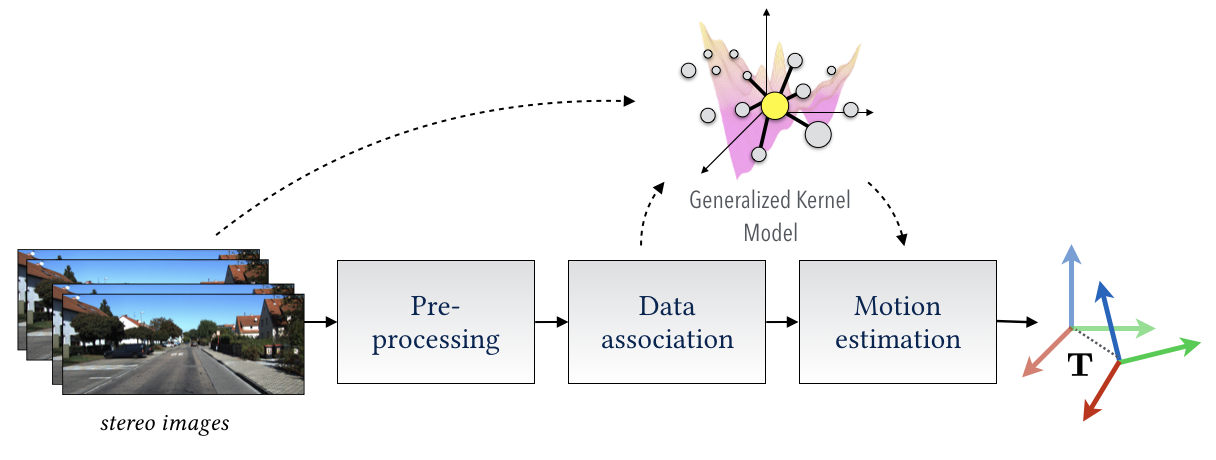
PROBE, and its follow-up, PROBE-GK (Generalized Kernels) is a heteroscedastic covariance model for image keypoints in visual odometry. Notably, PROBE-GK presents a novel Bayesian formulation for deriving a robust cost function for sparse keypoint reprojection errors.
Events
August, 2020 - I moved to Cambridge! After months of uncertainty I have finally arrived in Massachusetts (which I will hopefully learn how to spell soon). Excited to embark on my postdoctoral journey.

March, 2020 - I passed the final oral examination of my doctoral degree! Thank you so much to all of my friends, collaborators and committee members.

 May, 2019 - After months of planning, my colleagues Lee, Matt and supervisor Jonathan Kelly organized a debates workshop at ICRA 2019. We were elated to see a fantastic turn-out for all three debates (plus lightning talks) and a ton of great feedback!
May, 2019 - After months of planning, my colleagues Lee, Matt and supervisor Jonathan Kelly organized a debates workshop at ICRA 2019. We were elated to see a fantastic turn-out for all three debates (plus lightning talks) and a ton of great feedback!

 August, 2017 - I’ve been working on my private pilot license (PPL) this summer at Burlington Executive Airport (CZBA). After two months of training, I finished my first solo flight (which means I was the only person in the aircraft). If you’re interested in seeing the whole flight, I
recorded the whole thing on my GoPro .
August, 2017 - I’ve been working on my private pilot license (PPL) this summer at Burlington Executive Airport (CZBA). After two months of training, I finished my first solo flight (which means I was the only person in the aircraft). If you’re interested in seeing the whole flight, I
recorded the whole thing on my GoPro .
Things I recommend
Below you’ll find a recent medley of things I really enjoy and love recommending to friends.
Essays
- Farther Away Jonathan Franzen on David Foster Wallace and loneliness.
- My Family’s Slave Alex Tizon on Lola, a woman who helped raise him.
- Lear, Tolstoy and the Fool George Orwell on why Tolstoy wasn’t a fan of Shakespeare.
Books
- A Confession - Leo Tolstoy
- Sapiens: A Brief History of Humankind - Yuval Noah Harari
- Frankenstein; or, The Modern Prometheus - Mary Shelley
- Blood Meridian or the Evening Redness in the West - Cormac McCarthy
- The Ones Who Walk Away from Omelas - Ursula K. Le Guin
- Fallen Leaves: Last Words on Life, Love, War, and God - Will Durant