
You may find a selection of my publications below. For a more thorough list, please refer to my Google Scholar or my curriculum vitae.
Selected Publications
2020
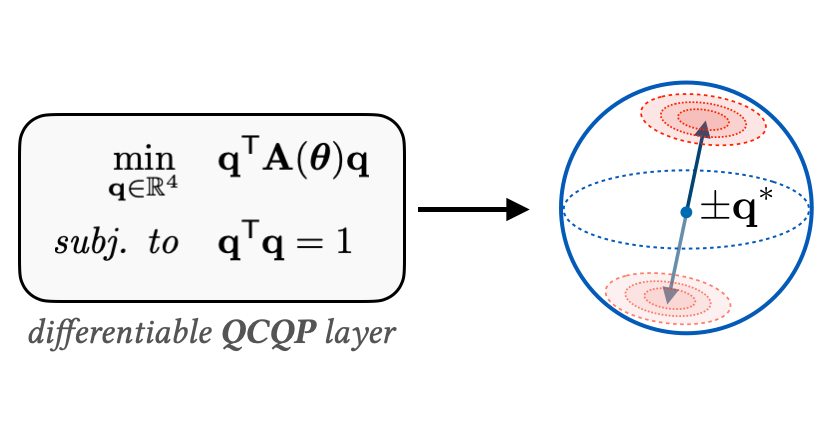
A Smooth Representation of SO(3) for Deep Rotation Learning with Uncertainty
Valentin Peretroukhin, Matthew Giamou, David M. Rosen, W. Nicholas Greene, Nicholas Roy, Jonathan Kelly
Best Student Paper Award
Robotics: Science and Systems (RSS), 2020
Official RSS Page, Code, arXiv, YouTube
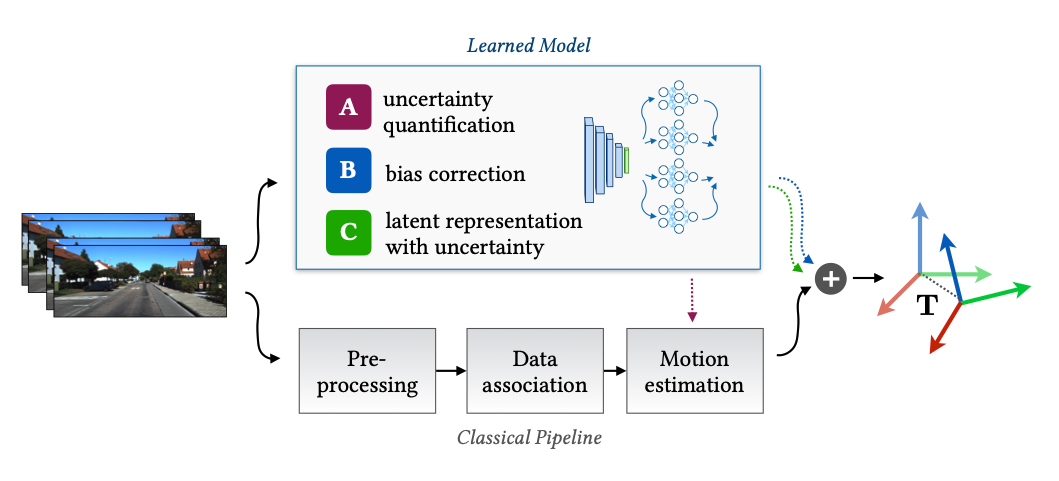
Learned Improvements to the Visual Egomotion Pipeline
Valentin Peretroukhin
Ph.D. Thesis
University of Toronto, 2020
Document,
Defense Slides
2019
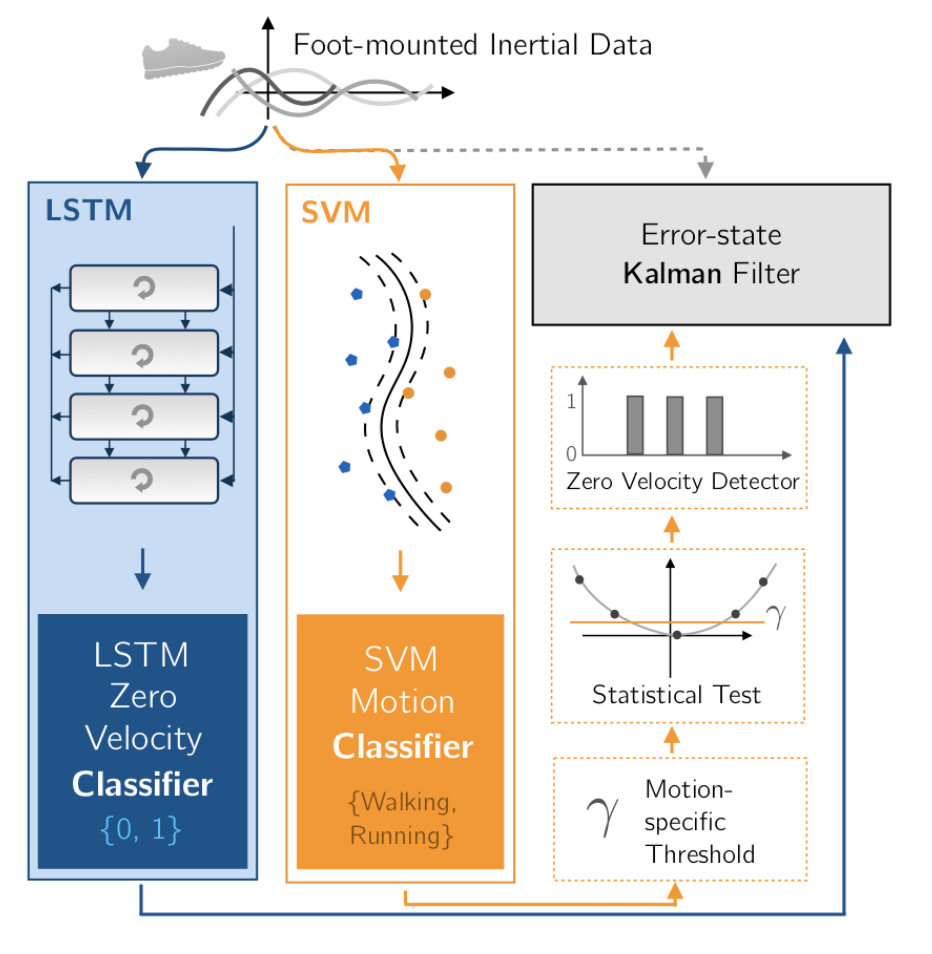
Robust Data-Driven Zero-Velocity Detection for Foot-Mounted Inertial Navigation
Brandon Wagstaff, Valentin Peretroukhin and Jonathan Kelly
IEEE Sensors Journal, 2019
Code, arXiv
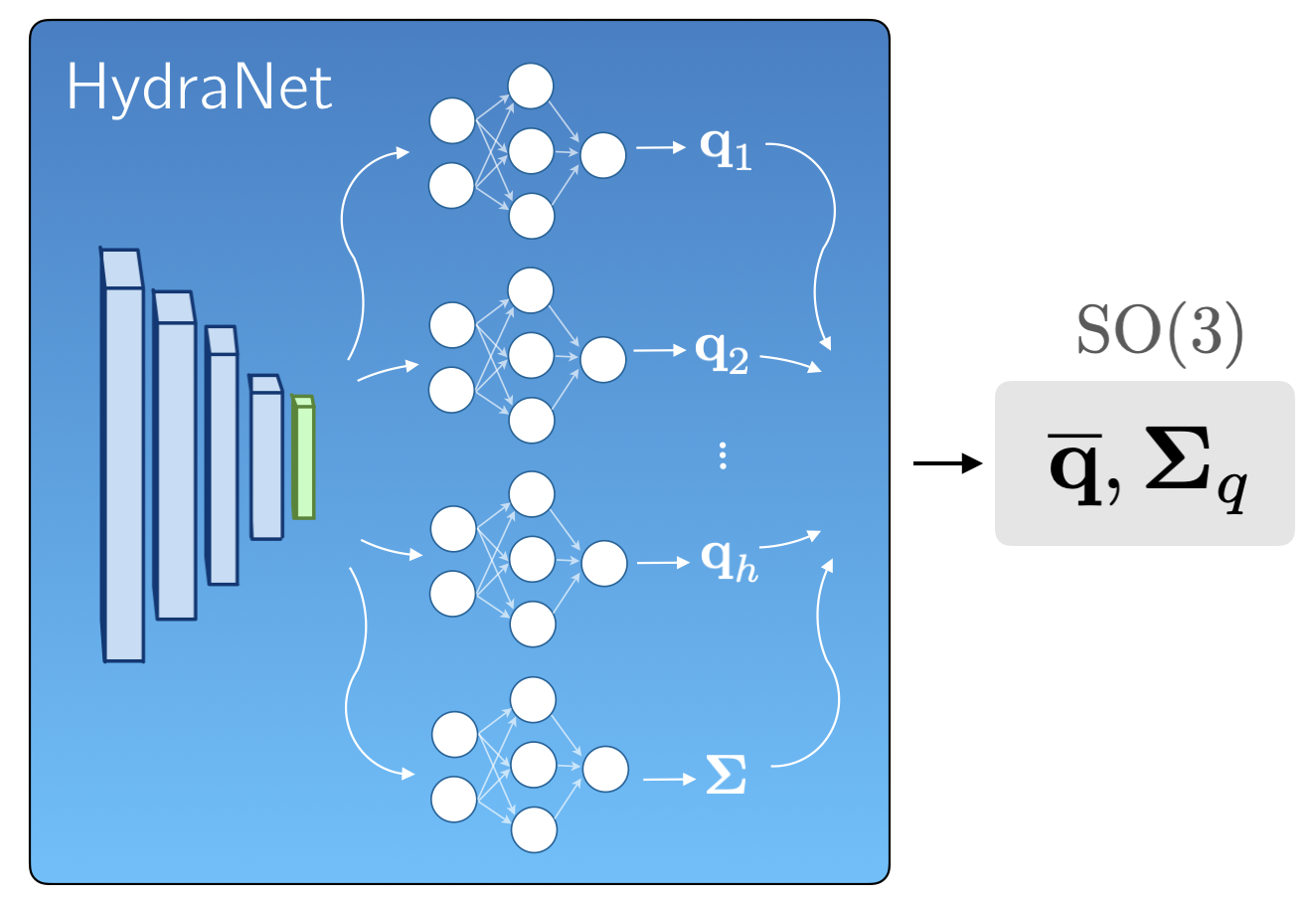
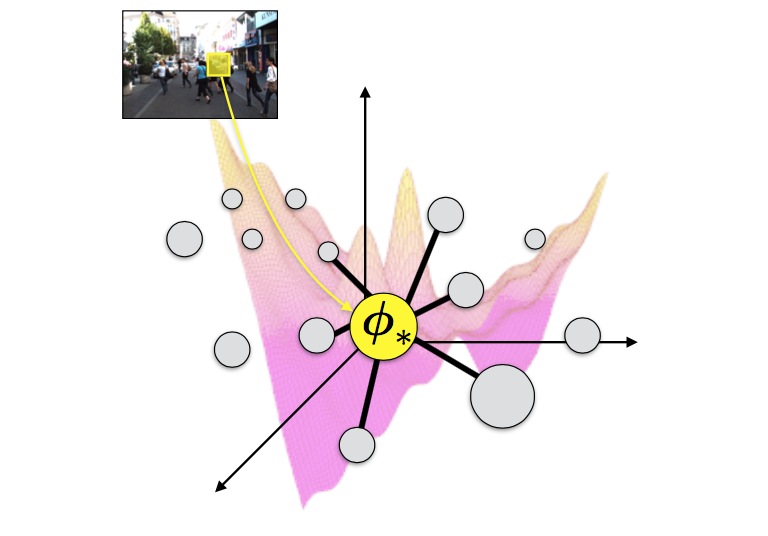
Deep Probabilistic Regression of Elements of SO(3)
Valentin Peretroukhin, Brandon Wagstaff, and Jonathan Kelly
CVPR 2019 Workshop on Uncertainty and Robustness in Deep Visual Learning in Long Beach, USA
Code, arXiv
2018
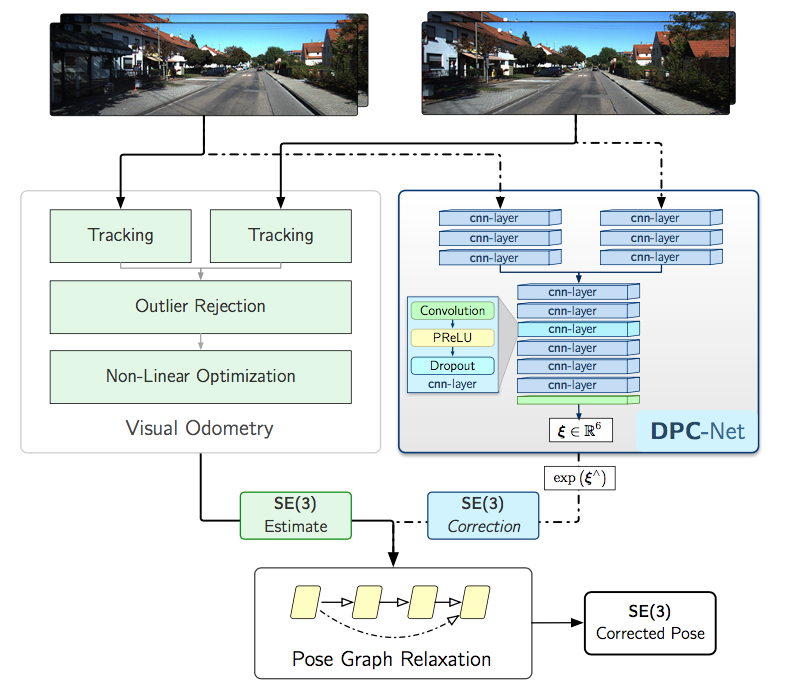
DPC-Net: Deep Pose Correction for Visual Localization
Valentin Peretroukhin and Jonathan Kelly
Robotics and Automation Letters (RAL) and ICRA 2018 (International Conference on Robotics and Automation) in Brisbane, Australia
arXiv, Code
Inferring sun direction to improve visual odometry: A deep learning approach
Valentin Peretroukhin*, Lee Clement*, and Jonathan Kelly
International Journal of Robotics Research (IJRR), Special Issue on Experimental Robotics, 2018
* Equal contribution
2017
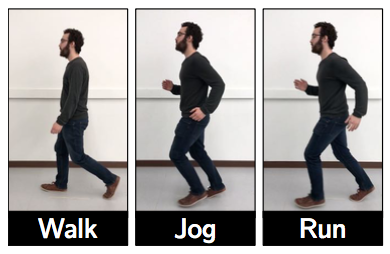
Improving Foot-Mounted Inertial Navigation Through Real-Time Motion Classification
Brandon Wagstaff, Valentin Peretroukhin, and Jonathan Kelly
To appear in IPIN 2017 (International Conference on Indoor Positioning and Indoor Navigation) in Sapporo, Japan
arXiv
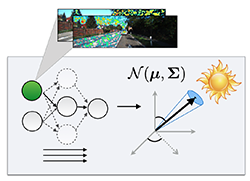
Reducing Drift in Visual Odometry by Inferring Sun Direction using a Bayesian Convolutional Neural Network
Valentin Peretroukhin*, Lee Clement*, and Jonathan Kelly
Presented at ICRA 2017 (International Conference on Robotics and Automation) in Singapore
arXiv, Code
* Equal contribution
2016
PROBE-GK: Predictive Robust Estimation using Generalized Kernels
Valentin Peretroukhin, William Vega-Brown, Nicholas Roy, and Jonathan Kelly
In proceedings of ICRA 2016, Presented in Stockholm, Sweden.
Paper, Slides, Interactive Poster
Improving the Accuracy of Stereo Visual Odometry Using Visual Illumination Estimation
Lee Clement, Valentin Peretroukhin, and Jonathan Kelly
In proceedings of ISER 2016. Presented in Tokyo, Japan.
arXiv
2015 and prior
PROBE: Predictive Robust Estimation for visual-inertial navigation
Valentin Peretroukhin, Lee Clement, Matthew Giamou and Jonathan Kelly
In proceedings of IROS 2015. Presented in Hamburg, Germany.
Paper, Slides, Video
Get to the point: active covariance scaling for feature tracking through motion blur
Valentin Peretroukhin, Lee Clement, and Jonathan Kelly
In proceedings of ICRA 2015 Workshop on Scaling up Active Perception. Presented in Seattle, Washington.
Extended Abstract, Poster, Slides
The Battle for Filter Supremacy: A Comparative Study of the Multi-State Constraint Kalman Filter and the Sliding Window Filter
Lee Clement, Valentin Peretroukhin, and Jonathan Kelly
In proceedings of CRV 2015 (Conference on Computer and Robot Vision). Presented in Halifax, Nova Scotia.
Paper, Slides
Optimizing Camera Perspective for Stereo Visual Odometry
Valentin Peretroukhin, Jonathan Kelly and Timothy D. Barfoot
In proceedings of CRV 2014. Presented in Montreal, Quebec.
Paper, Slides
Towards Autonomous Mobile Robots for the Exploration of Steep Terrain
Braden Stenning, Lauren Bajin, Christine Robson, Valentin Peretroukhin, Gordon R. Osinski and Timothy D. Barfoot
In proceedings of FSR 2013 (International Conference on Field and Service Robotics). Presented in Brisbane, Australia.